PositionReceiver Device
A PositionReceiver Device is created in the same way as any other device type.
Please see the sub-chapter Creating Devices for step-by-step instructions on how to create a device, and select PositionReceiver Device from the menu of different device types. This will open the PositionReceiver Device editor (explained below).
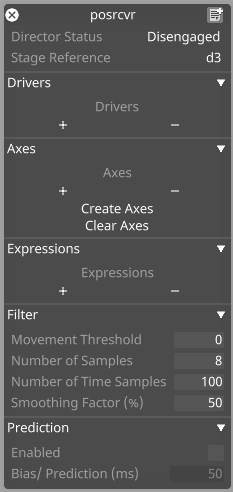
PositionReceiver Device editor
Status
Toggles whether the device is active.
Stage Reference
Sets the frame of reference for the incoming data.
Drivers
The PositionDriver is the object that decodes the data sent from the motion control system. Most of the time a driver is bespoke for a particular system.
Visit this link for more information on types of Position drivers supported by Disguise software.
Axes
A list of PositionAxis objects that control the movement of individual objects along each axis.
Expressions
A list of PositionAxisExpression objects. An AxisExpression object evaluates the data from the PositionAxis objects using an arithmetic expression and sends the result to the objects.
For example,
((Axis A + Axis B) @/ 2)
Filter
Minimum Threshold: Minimum change needed before updating the output value.
Number of Samples: Number of position samples to filter.
Number of Time Samples: Number of time samples to filter.
Smoothing Factor: Smooths the data- caution when using higher values as this can increase latency
Prediction
Enabled: Used to predict tracked positions at a later time
Bias/Prediction (ms): Compensates for time latency between received data and projector output
For information on configuring a PositionReceiver Device with a tracking source, visit this link